凯发官方首页-凯发娱乐登录 > 新闻中心 > 产品动态
vicando新版本发布(part1) | 点云库(pcl)集成
激光雷达
随着智能驾驶技术的发展,激光雷达迅速的进入工程师的视野,不管是机械式、mems还是纯固态激光雷达,本质上都是以一定的速度扫描照射区域,在此过程中激光雷达不断的发出激光并接收反射信息。激光雷达的反射点信息包含了距离、时间和水平角度(azimuth)等信息,同时结合激光发射器的固定垂直角度,即可以计算出反射点的坐标信息,每一次扫描中所有反射点的集合即为点云(point cloud)。而伴随着激光雷达的高精度带来的数据量爆发,点云数据的实时处理就成为工程师要面对的一大挑战。
当前阶段工程师处理点云的校准、分类和分割等任务。利用pcl(点云库)我们可以实现抽取点云特征、处理目标分类、目标分割及可视化等需求。同时在处理点云数据的同时也需要同步的考虑其他信号的接入,如视频、毫米波、各类总线信号等。
因此能否有合适的工具既可以同步的采集所需的各种数据,又能够方便的支撑工程师去进行开发,就是智能驾驶开发工程师需要直接面对的一个问题。
点云数据实时处理
vicando suite是针对智能驾驶功能的开发和测试平台,能够同步的采集所需的各类数据,包括但不限于如下列表中的数据源,同时工具集成pcl(点云库),工程师可以直接使用pcl来进行相关的开发。
vicando suite直接支持的数据源:


• 示例应用:lidar点云数据处理
♦ 地面点云(平面)分割,系统采用两个16线激光雷达
♦ 目的:lidar探测到的点云中有相当数量是地面信号,不利于障碍物识别,且增加计算负担
♦ 方法:ransac(随机采样一致性)

pcl::sacsegmentation
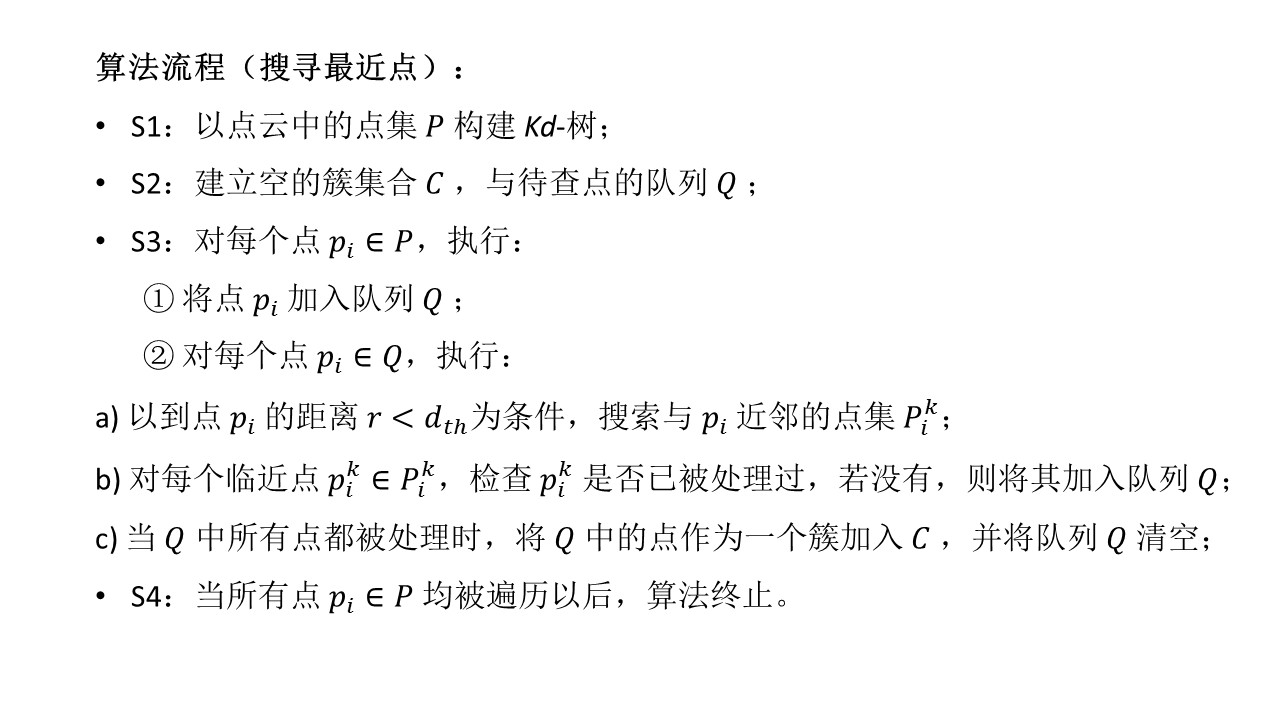
• 示例应用:障碍物聚类
♦ 方法:euclidean聚类(只考虑空间距离或考虑intensity等额外条件)

只考虑距离
pcl::euclideanclusterextraction

考虑距离和强度intensity
pcl::conditionaleuclideanclustering
• 示例应用:vicando的点云/视频显示处理界面


vicando suite 产品介绍
vicando suite是针对智能驾驶功能的开发和测试平台软件套装。

软件包含如下组件:

• vicando:
vicando是一款跨平台的,针对ad/adas开发的数据记录和分析工具,支持运行在windows、linux、macos等操作系统,支持x86、arm等平台。
• vicanlog:
设计用于车端路试采集的软件,可以运行在任何基于linux的硬件设备上,无人值守采集数据。除了一般计算机外,也支持nvidia tx-2、xavier,nexcom等设备。
• vicandroid:
安卓端的app,可以采集can总线和视频、音频、gps等数据,内建ftp服务,可以自动的上传数据到服务器。便于方便的对数据进行处理分析。
• vicansim:
通过与opencv和matlab/simulink™等的集成,方便用户部署自己的算法在vicansim上,于此同时也具有与matlab/simulink™的接口。
• vicanbedded:
vicanbedded的目标是应用与嵌入式环境,与vicando 相同。它旨在轻松地将源代码从 pc 平台移植到到嵌入式环境。目前,它可支持 qtembedded 4.x及更高版本、qnx、velocity、vxworks等。