凯发官方首页-凯发娱乐登录 > 新闻中心 > 产品动态
经纬恒润智能驾驶开发、测试评估平台——传感器对标评估系统
应用背景
智能驾驶汽车应用多种传感器对目标物探测,如采用激光雷达、毫米波雷达、摄像头等传感器。在开发和测试智能驾驶汽车时,往往需要将不同种类的传感器识别的目标物进行对比,或者对某种传感器与真值传感器(ground truth, gt)进行对标评估。
.png)
图1 真值传感器和测试传感器识别目标物示意图(资料图)
传感器对标评估系统
.png)
图2 传感器对标评估系统数据选择和位置标定界面
为了实现两种传感器识别目标物对比,传感器对标评估系统具备以下功能:
• 根据传感器识别的目标点信息,自动匹配目标物的轨迹
• 计算测试传感器的漏报、误报情况
• 统计测试传感器的识别目标物信息
.png)
图3 真值传感器和测试传感器识别目标物轨迹
核心功能:轨迹对比算法
• 轨迹挑选
利用多帧数据,自动获取目标物的轨迹曲线;目标物如果存活帧数过少或存活时间太短,无法形成有效轨迹,则被认为杂点忽略。
• 范围限制
选取真值传感器和对比传感器的公共探测区域来对比,忽略公共区域以外的目标物。可以对近程(±45°,60m)、中程(±9°,120m)、远程(±4°,180m)的轨迹进行选择,或者根据自定义范围筛选轨迹。
• 快速轨迹比对
采用轨迹非特征点抽希和动态时间规整等算法,能够较好地比对真值和对比传感器识别的目标物轨迹。如下图所示,采用该算法匹配的真值传感器(gt)和对比传感器轨迹能够和实车采集的数据吻合。
.png)
图4 真值传感器和测试传感器识别目标物轨迹对比和实车测试图
核心功能:识别目标数统计
• 真值传感器和测试传感器的识别总数统计
• 测试传感器识别目标漏报率统计
• 测试传感器识别目标误报率统计
.png)
图5 识别目标数统计报告(示例)
核心功能:识别目标物信息统计分析
• 可以分析真值和测试传感器识别目标物的角度分布
• 可以分析真值和测试传感器识别目标物的距离分布
• 可以分析真值和测试传感器识别目标物的距离差分布。可分别统计两种传感器识别的目标物相对速度重合区的分布或者非重合区的分布
• 可以分析真值和测试传感器识别目标物的角度差分布。可分别统计两种传感器识别的目标物相对速度重合区的分布或者非重合区的分布
• 可以分析真值和测试传感器识别目标物的角度、距离、相对速度分布,并进行三维展示
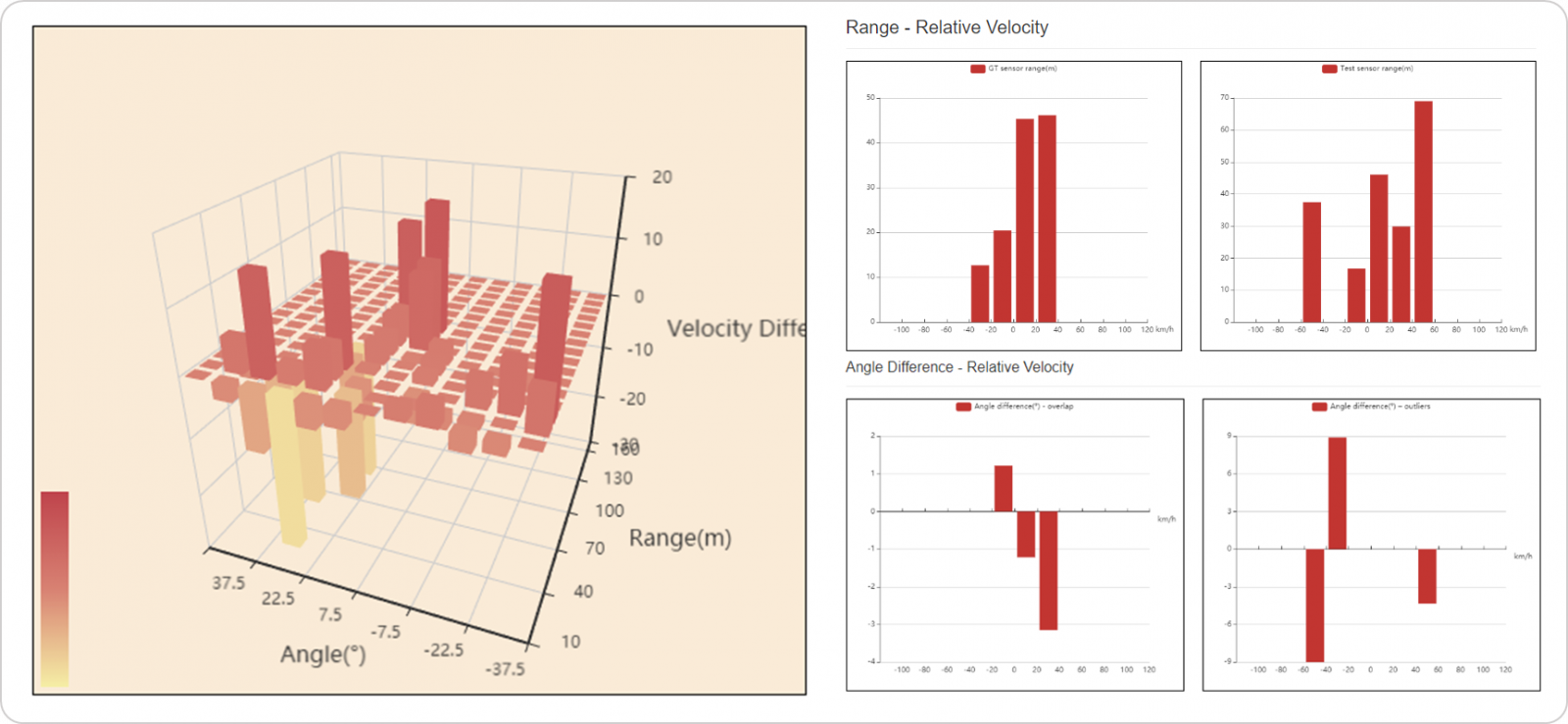
图6 识别目标物信息统计分析报告(示例)