凯发官方首页-凯发娱乐登录 > 新闻中心 > 产品动态
arbe — 新一代 4d 成像雷达
目前广泛应用的77ghz毫米波雷达具有作用距离远、测速精度高、受天气影响小等优势,但也存在角度分辨率低、虚警和误报严重、同频雷达干扰等缺点。尤其是l3以上级别智能驾驶系统对雷达传感器提出了更高的要求,如高角度分辨能力、类激光雷达的点云目标输出、强抗干扰等。因此,研究和开发分辨率高、目标识别能力强、抗干扰性能优越的新一代毫米波成像雷达产品是一种趋势。
arbe robotics公司是毫米波成像雷达研发企业,其开发的雷达芯片组凯发娱乐登录的解决方案—“phoenix”,通过识别、评估和响应具有挑战性的场景与4d超高分辨率实时成像,无论周围的天气和光照条件如何,phoenix都能区分真实的威胁和虚假警报。
phoenix是一款适用于l2.5/l3/l4/l5场景的4d点云高清成像雷达,4个维度分别为azimuth( 水平夹角 ),elevation(高程),range(距离)和speed(本车速度矢量),其优势是支持全天候测量,易车规,测速准,成本低,并且可以高清点云成像,达到高角分辨率,尤其是高程角分辨率。
arbe 4d 成像雷达功能参数
arbe 4d毫米波雷达因其采用了天线芯片设计,可以得到点云数据。其探测距离可以达到300 米,同时高程分辨率可以达到2°,即可以通过对点云的算法来进行障碍物分类,同样可以解决雷达在卡车识别、经过桁架或桥梁时出现的探测问题。
• 高分辨率: 1°横向分辨率 & 2°纵向分辨率
• 广探测区:100°水平方向 & 30°纵向
• 长距:0.5m - 300m 探测距离
• 高实时性:30fps(4d模式下)
• 高距离分辨率:7.5cm@38m,60cm@300m
• 多普勒分辨率:0.1m/s
• 误报:不存在
• 调制方式: 调频连续波技术(fmcw)

图 1 成像雷达功能参数
arbe 4d 成像雷达效果
由于单只毫米波雷达可以对本车速度进行估计,其点云可以通过颜色来表示交通参与者的运动方向,其中绿色表示相对静止,蓝色表示相向运动,红色表示相离运动。此车速可以和gnss/ins系统进行融合。
通过机器学习或深度学习的算法可以对这些点云数据进行分析,可用于障碍物的跟踪,部分障碍物的分类,与摄像头融合可用于l3 等级的智能驾驶中。同样也可以作为其他毫米波雷达的真值雷达,为其他毫米波雷达提供参照。

图 2 4d毫米波雷达点云数据
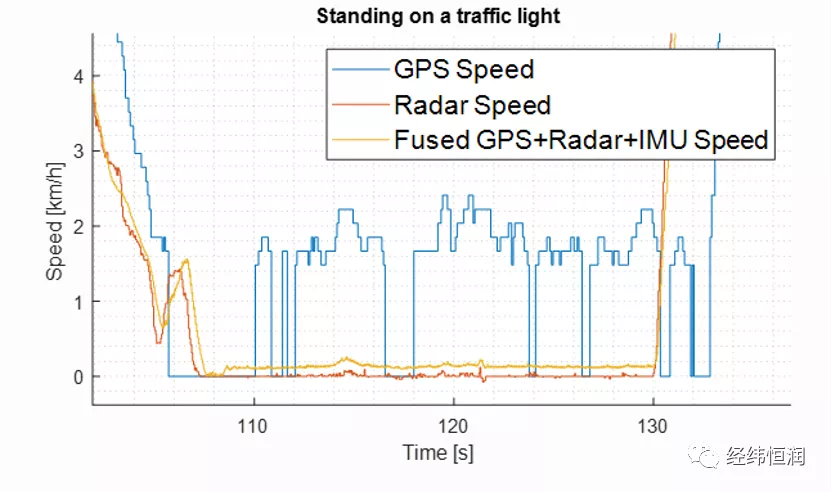
图 3 雷达测量车速和gps、imu车速融合结果